Python proxy#
The Python module defines:
A class per structure used in the interfaces of the root operators. These classes derive from
ctypes.Structure.A global variable
sensorswith one read/write property per sensor in the model.A class per root operator which defines:
One read/write property per input
One read-only property per output
Two functions to address the C code:
call_reset(self) -> Nonecall_cycle(self, cycles: int = 1, refresh: bool = True, debug: bool = False) -> NoneThe
refreshanddebugparameters are used for SCADE Suite co-simulation.
Example#
The python module’s usage is straightforward:
Create an instance of a root operator.
Call its reset function.
Loop:
Set the sensors
Set the inputs
Call the cyclic function
Get the outputs
The script hereafter is an example of client for the following model:
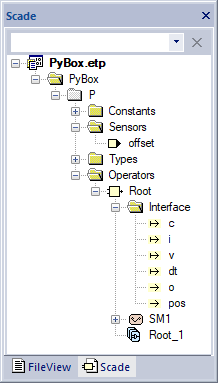
# py_box.py/py_box.dll are produced from PyBox.etp
import py_box
# set the sensors
# P::offset: float64
py_box.sensors.offset = 0.5
# create an instance of the root operator P::Root
root = py_box.Root()
# and reset it
root.call_reset()
# set the inputs
# P::Root/c: bool
root.c = True
# P::Root/v: Speed (defined as float64 ^ 3)
root.v = (1.0, 2.0, 3.0)
# P::Root/v: float64
root.dt = 0.1
for cycle in range(4):
# P::Root/i: int32
root.i = cycle + 1
# call the cyclic function
root.call_cycle()
# print the results
# P::Root/pos: Position
print(root.o, root.pos.x, root.pos.y, root.pos.z)
# P::Root/c: bool
root.c = False
Access to values#
Scalar values: Use Python literals
root.valid = True root.array[0] = 3.14 root.points[2].x = 0
Complex Values: Use Python tuples or
ctypesliteralsConsider the following types:
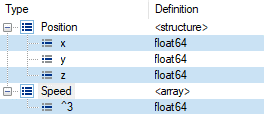
OK
root.array = (ctypes.double*3)([3, 1, 4]) root.array = (3, 1, 4) root.points[2] = CPosition_P(x=1, y=2, z=3) root.points[2] = (1, 2, 3) root.points = ((1, 2, 3), (3, 4, 5), (6, 7, 8))
NOK
root.array = [3, 1, 4] root.points[2] = {"x": 1, "y": 2, "z": 3}
Limitations#
The wrapper does not support for now the input_threshold and
global_context KCG options.